


破拆机器人RHC160
RHC160型多功能工程机器人是国内自主研发的一种电机驱动,用于高危环境下具有精细化作业能力的新型高科技装备。
分类:
破拆机器人

热线:
- 一般信息
- 技术规格
- 图片
- 视频
- 附件
-
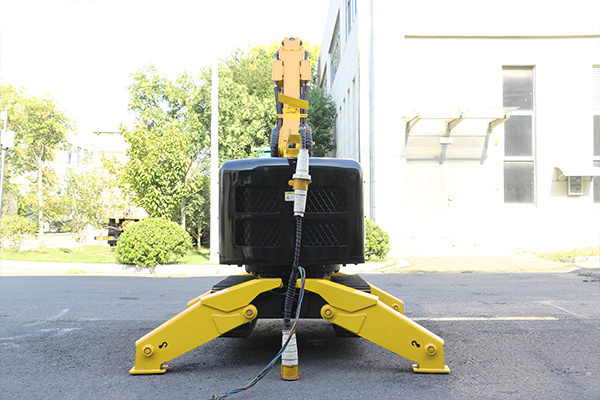
RHC160型多功能工程机器人是国内自主研发的一种电机驱动,用于高危环境下具有精细化作业能力的新型高科技装备。该设备采用小型履带运动底盘作为载体,将负载反馈式电液比例系统、基于 CAN 总线的数字式双向有线遥控系统以及多参数传感系统有机融合,可快速配置液压锤、挖斗、抓取器、液压钻等不同作业机具,在高温、高粉尘、易坍塌的危险区域中灵活地进行全方位遥控的破碎、挖掘、抓取、搬运等多功能作业。主要应用领域有建筑拆除、回转窑维修、矿山、隧道施工、冶金炉窑维修、核工业。
广泛应用于:核工业
隧道暗挖
冶金工业
建筑破拆
各种回转窑(水泥、石灰石、球团)
-
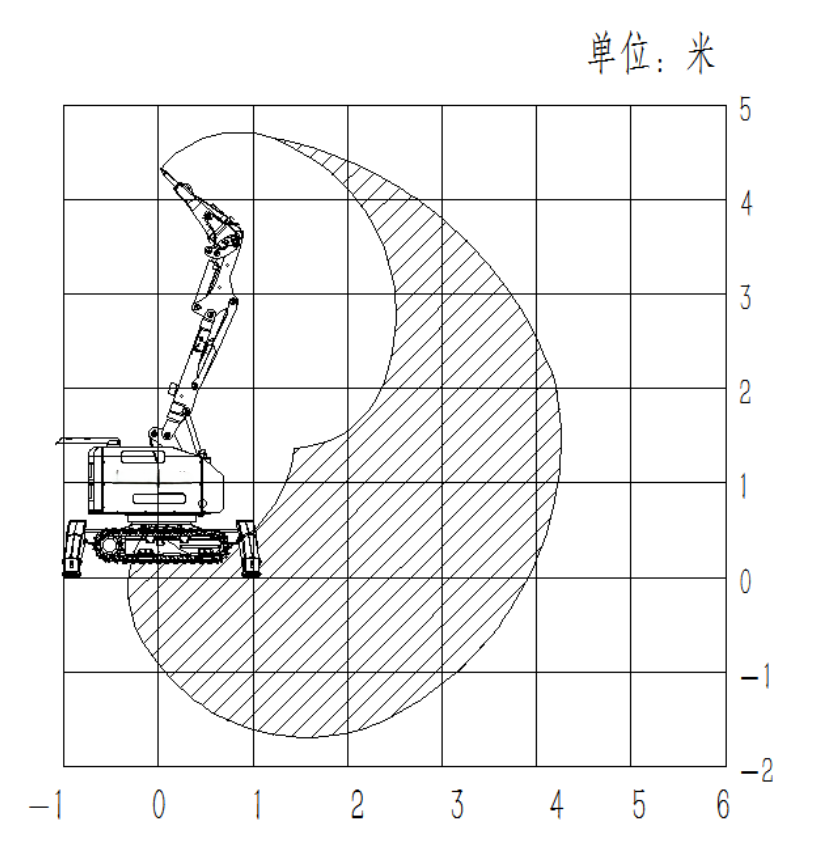
技术参数 性能指标 整机性能 整车装备质量 2100kg 行走速度 2.2/2.5km/h 回转速度 12秒/360° 爬坡度 30° 履带宽度 230mm 可配工具 液压锤、液压剪、挖斗、抓取器等 几何尺寸 运输尺寸 运输长度:2800mm 最低运输高度:1560mm 最小运输宽度:780mm 工作空间 最大工作高度:4800mm 最大工作半径:4400mm 最大工作深度:1700mm 动力系统 电机驱动 型号: YX3-200L 功率/转速:22kW@1470r/min 额定转矩:143N.m 液压系统 主泵 负载敏感式轴向柱塞变量泵 输出流量 0~60L/min 主阀 负载反馈压力补偿式电液比例多路阀 系统额定压力 19/24MPa 液压马达 回转马达:NACHI 行走马达:NACHI 液压油箱容积 80L 控制系统 控制装置 便携式遥控器 控制方式 无线 通讯模式 基于CAN总线的数字式有线双向通讯 尺寸图 工作范围图 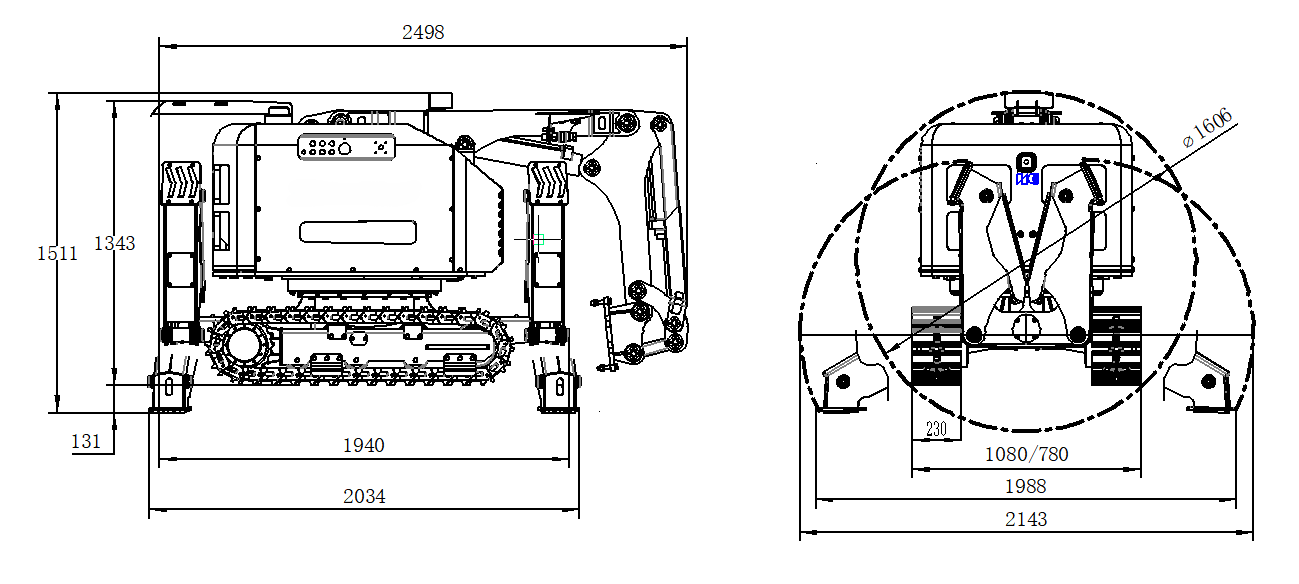
-








产品咨询
如果您对我们的产品感兴趣,请留下您的电子邮件,我们会尽快联系我们您。谢谢!
快速链接
联系我们
研发中心:
江苏省南京市浦口区高新技术开发区星火路14号
工厂:
安徽省滁州市南谯区高教科创城园区无人系统智能制造示范区5号厂房
电话:
189-13824450(徐经理)





视频号


微信公众号